Hello, I have completed defining a rectangular observation sensor on a satellite and attempted to observe the ground. But I have made multiple modifications to the elevation and half Aperture AlongTrack, half Aperture AcrossTrack, as well as extending the observation time, but I have found that no results can be observed. When the observation time was extended to 1400000000 seconds, it still did not occur. I feel like there may be some issues with the code, but I can’t figure out where the problem lies. Could you please help me take a look.
Cheers,
Yang
import java.io.File;
import java.util.Locale;
import org.hipparchus.geometry.euclidean.threed.Vector3D;
import org.hipparchus.ode.events.Action;
import org.hipparchus.util.FastMath;
import org.orekit.attitudes.AttitudeProvider;
import org.orekit.attitudes.LofOffset;
import org.orekit.bodies.BodyShape;
import org.orekit.bodies.GeodeticPoint;
import org.orekit.bodies.OneAxisEllipsoid;
import org.orekit.data.DataContext;
import org.orekit.data.DataProvidersManager;
import org.orekit.data.DirectoryCrawler;
import org.orekit.frames.Frame;
import org.orekit.frames.FramesFactory;
import org.orekit.frames.LOFType;
import org.orekit.frames.TopocentricFrame;
import org.orekit.geometry.fov.DoubleDihedraFieldOfView;
import org.orekit.geometry.fov.FieldOfView;
import org.orekit.orbits.KeplerianOrbit;
import org.orekit.orbits.Orbit;
import org.orekit.propagation.Propagator;
import org.orekit.propagation.SpacecraftState;
import org.orekit.propagation.analytical.KeplerianPropagator;
import org.orekit.propagation.events.BooleanDetector;
import org.orekit.propagation.events.ElevationDetector;
import org.orekit.propagation.events.EventDetector;
import org.orekit.propagation.events.FieldOfViewDetector;
import org.orekit.propagation.events.NegateDetector;
import org.orekit.time.AbsoluteDate;
import org.orekit.time.TimeScalesFactory;
import org.orekit.utils.Constants;
import org.orekit.utils.IERSConventions;
import org.orekit.utils.PVCoordinates;
public class RectangularSensorView {
public static void main(String[] args) {
final File home = new File(System.getProperty("user.home"));
final File orekitData = new File(home, "orekit-data");
if (!orekitData.exists()) {
System.err.format(Locale.US, "Failed to find %s folder%n", orekitData.getAbsolutePath());
System.err.format(Locale.US,
"You need to download %s from %s, unzip it in %s and rename it 'orekit-data' for this tutorial to work%n",
"orekit-data-master.zip",
"https://gitlab.orekit.org/orekit/orekit-data/-/archive/master/orekit-data-master.zip",
home.getAbsolutePath());
System.exit(1);
}
final DataProvidersManager manager = DataContext.getDefault().getDataProvidersManager();
manager.addProvider(new DirectoryCrawler(orekitData));
// Initial state definition : date, orbit
final AbsoluteDate initialDate = new AbsoluteDate(2023, 9, 15, 4, 0, 00.000, TimeScalesFactory.getUTC());
final double mu = 3.986004415e+14; // gravitation coefficient
final Frame inertialFrame = FramesFactory.getEME2000(); // inertial frame for orbit definition
final Vector3D position = new Vector3D(2797914.567, -2288195.171, 6012468.374);
final Vector3D velocity = new Vector3D(-6089.132, 2403.774, 3732.121);
final PVCoordinates pvCoordinates = new PVCoordinates(position, velocity);
final Orbit initialOrbit = new KeplerianOrbit(pvCoordinates, inertialFrame, initialDate, mu);
// Earth and frame
final Frame earthFrame = FramesFactory.getITRF(IERSConventions.IERS_2010, true);
final BodyShape earth = new OneAxisEllipsoid(Constants.WGS84_EARTH_EQUATORIAL_RADIUS,
Constants.WGS84_EARTH_FLATTENING, earthFrame);
// Station
final double longitude = FastMath.toRadians(0);
final double latitude = FastMath.toRadians(0);
final double altitude = 0.;
final GeodeticPoint station1 = new GeodeticPoint(latitude, longitude, altitude);
final TopocentricFrame sta1Frame = new TopocentricFrame(earth, station1, "喀什");
// Defining rectangular field of view
double halfApertureAlongTrack = FastMath.toRadians(20);
double halfApertureAcrossTrack = FastMath.toRadians(20);
FieldOfView fov = new DoubleDihedraFieldOfView(Vector3D.MINUS_I, // From satellite to body center
Vector3D.PLUS_K, halfApertureAcrossTrack, // Across track direction
Vector3D.PLUS_J, halfApertureAlongTrack, // Along track direction
0); // Angular margin
// Defining attitude provider
AttitudeProvider attitudeProvider = new LofOffset(inertialFrame, LOFType.LVLH);
// Defining your propagator and setting up the attitude provider
Propagator propagator = new KeplerianPropagator(initialOrbit);
propagator.setAttitudeProvider(attitudeProvider);
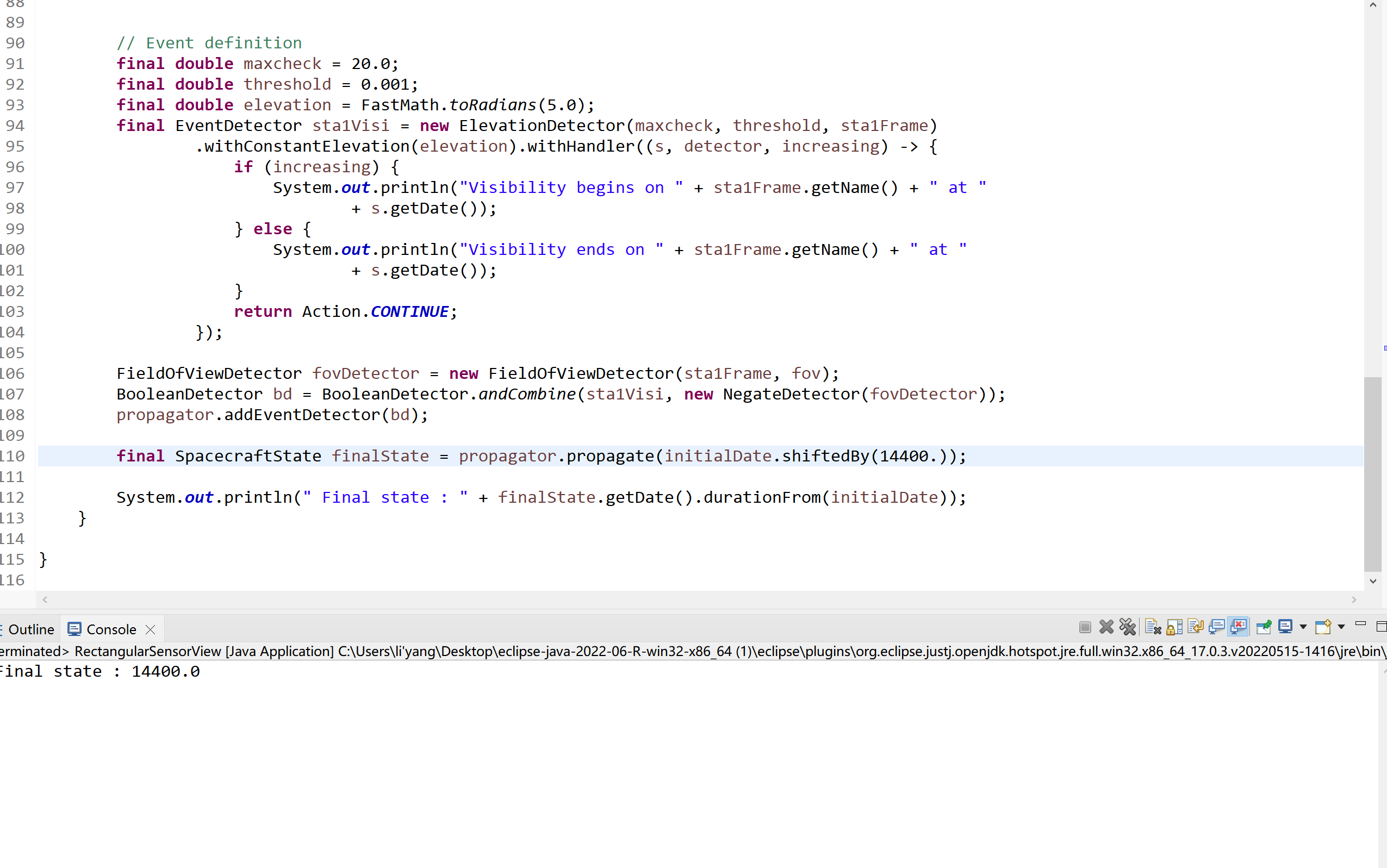
// Event definition
final double maxcheck = 20.0;
final double threshold = 0.001;
final double elevation = FastMath.toRadians(100.0);
final EventDetector sta1Visi = new ElevationDetector(maxcheck, threshold, sta1Frame)
.withConstantElevation(elevation).withHandler((s, detector, increasing) -> {
if (increasing) {
System.out.println("Visibility begins on " + detector.getTopocentricFrame().getName() + " at "
+ s.getDate());
} else {
System.out.println("Visibility ends on " + detector.getTopocentricFrame().getName() + " at "
+ s.getDate());
}
return Action.CONTINUE;
});
FieldOfViewDetector fovDetector = new FieldOfViewDetector(sta1Frame, fov);
BooleanDetector bd = BooleanDetector.andCombine(sta1Visi, new NegateDetector(fovDetector));
propagator.addEventDetector(bd);
final SpacecraftState finalState = propagator.propagate(initialDate.shiftedBy(1440000.));
System.out.println(" Final state : " + finalState.getDate().durationFrom(initialDate));
}
}