Hi everyone!
I am working in obtaining the ellipsoid of covariance to know with a certain probability where my spacecraft is going to be. Following the tutorial of @yzokras:
From a set of GPS data of my satellite, I perform OD with BLS, obtaining the following residuals in orbital frame:
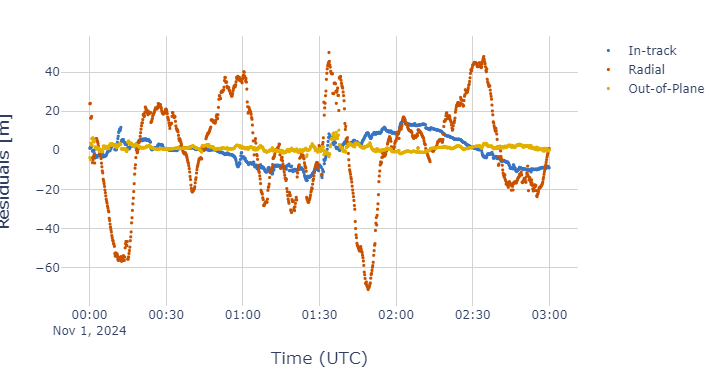
(I estimated the CD parameter, I included third body forces and harmonic coefficients up to 64)
Propagating the covariance with the estimated propagator I obtain the following standard deviations at each timestamp:
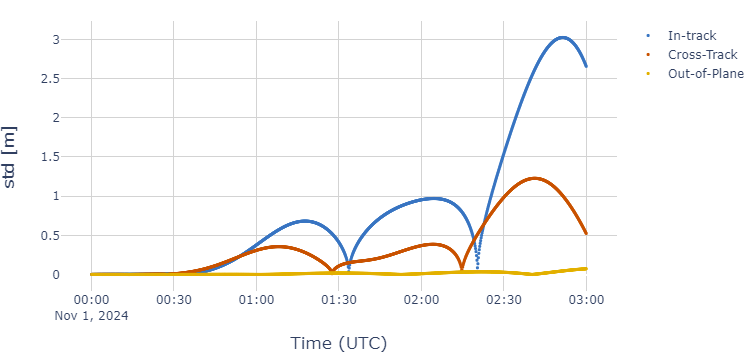
I know that the magnitude of the standard deviations obtained depends directly on the sigma of my GPS I use at the beginning of my estimation procedure, so:
-
How can I get real values of these standard devilations that match with my residuals, to know the real ellipsoid at any time? (I want my 3sigma to be more than my residuals amplitude if that makes sense)
-
When I compute the covariance matrix in orbital frame, I saw that at some timestamps some elements of the diagonal are negative, do you know why this could be happening?
-
Looking at my residuals, do you know why I have much more in the radial component? I could reduce the out of plane component adding third body perturbations and the along track component estimating the CD.
Thank you so much,
Checa