Hello all,
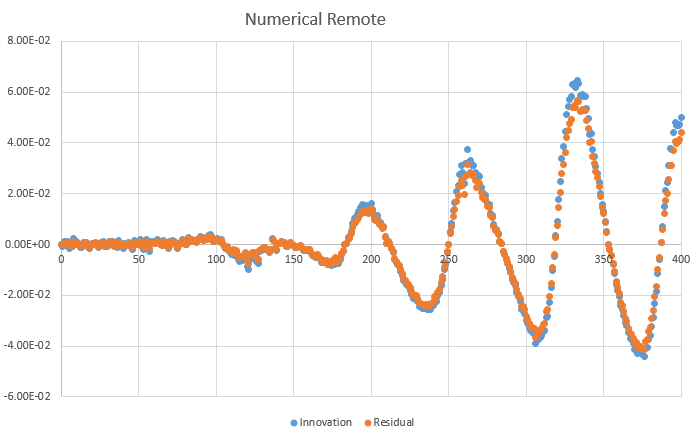
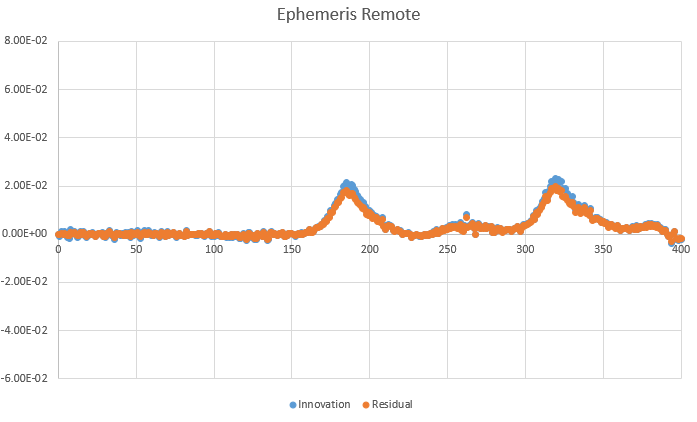
When using an EphemerisPropagatorBuilder in the propagation configuration of the remote satellite of a inter-satellite range measurement in the Kalman Estimator, the estimator produces theoretical measurements that are a few hundred meters off of the expected value. The remote satellite isn’t being estimated by the Kalman estimator. However if a numerical propagator builder is used, the theoretical measurements produced are very close to the observed values.
The EphemerisPropagatorBuilder is made using saved states from the same numerical propagator builder/numerical propagator.
Is this an unintended or overlooked use case of the EphemerisPropagatorBuilder?
I went a created a test that demonstrates the behavior as part of debugging my code.
package org.orekit.estimation.sequential;
import org.hipparchus.geometry.euclidean.threed.Vector3D;
import org.hipparchus.linear.MatrixUtils;
import org.hipparchus.linear.RealMatrix;
import org.junit.jupiter.api.Assertions;
import org.junit.jupiter.api.BeforeAll;
import org.junit.jupiter.api.Test;
import org.orekit.attitudes.LofOffset;
import org.orekit.bodies.OneAxisEllipsoid;
import org.orekit.estimation.EstimationTestUtils;
import org.orekit.estimation.measurements.EstimatedMeasurementBase.Status;
import org.orekit.estimation.measurements.InterSatellitesRange;
import org.orekit.estimation.measurements.InterSatellitesRangeMeasurementCreator;
import org.orekit.estimation.measurements.ObservedMeasurement;
import org.orekit.estimation.measurements.modifiers.Bias;
import org.orekit.estimation.measurements.modifiers.OutlierFilter;
import org.orekit.forces.ForceModel;
import org.orekit.forces.gravity.HolmesFeatherstoneAttractionModel;
import org.orekit.forces.gravity.OceanTides;
import org.orekit.forces.gravity.potential.GravityFieldFactory;
import org.orekit.forces.gravity.potential.NormalizedSphericalHarmonicsProvider;
import org.orekit.frames.Frame;
import org.orekit.frames.FramesFactory;
import org.orekit.frames.LOFType;
import org.orekit.orbits.CartesianOrbit;
import org.orekit.orbits.Orbit;
import org.orekit.orbits.PositionAngleType;
import org.orekit.propagation.BoundedPropagator;
import org.orekit.propagation.EphemerisGenerator;
import org.orekit.propagation.SpacecraftState;
import org.orekit.propagation.SpacecraftStateInterpolator;
import org.orekit.propagation.conversion.*;
import org.orekit.propagation.numerical.NumericalPropagator;
import org.orekit.propagation.sampling.OrekitFixedStepHandler;
import org.orekit.time.AbsoluteDate;
import org.orekit.time.TimeScalesFactory;
import org.orekit.utils.*;
import org.orekit.utils.ParameterDriversList.DelegatingDriver;
import java.util.ArrayList;
import java.util.List;
public class KalmanEstimatorInterSatelliteRangeTest {
@BeforeAll
static void configureData() {
EstimationTestUtils.eccentricContext("regular-data:potential:tides");
}
/** Test with the remote satellite being out of the plane of the local satellite. */
@Test
void testInterSatellitesRangeWithRemoteBoundedPropagatorBuilder() {
final AbsoluteDate date = new AbsoluteDate("2024-05-23T00:00:33.111419", TimeScalesFactory.getGPS());
final Vector3D localPosition = new Vector3D(-37205.80484266836, 3504532.953116421, 6230273.661843251);
final Vector3D localVelocity = new Vector3D(-1062.2390057078976, 6442.740442569944, -3622.17095245251);
final TimeStampedPVCoordinates localPV = new TimeStampedPVCoordinates(date, localPosition, localVelocity);
final CartesianOrbit localOrbit = new CartesianOrbit(localPV, FramesFactory.getEME2000(), Constants.WGS84_EARTH_MU);
final double remoteSatelliteClockOffset = -2.0E-7;
final double localSatelliteClockOffset = 6.3E-7;
final Vector3D remotePosition = new Vector3D(-532734.1485239803, 1384032.5346367855, 6991640.04315555);
final Vector3D remoteVelocity = new Vector3D(-4669.520076713515, 5637.939547078139, -1468.6682081317026);
final TimeStampedPVCoordinates remotePV = new TimeStampedPVCoordinates(date, remotePosition, remoteVelocity);
final CartesianOrbit remoteOrbit = new CartesianOrbit(remotePV, FramesFactory.getEME2000(), Constants.WGS84_EARTH_MU);
System.out.println("Remote with numerical builder");
genericTest(localOrbit, localSatelliteClockOffset, remoteSatelliteClockOffset, remoteOrbit, true);
System.out.println("Remote with ephemeris builder");
genericTest(localOrbit, localSatelliteClockOffset, remoteSatelliteClockOffset, remoteOrbit, false);
}
/** Generic test to test whether changing the propagator builder for the remote satellite that is not being estimated effects
* whether the kalman filter accepts or rejects a measurement.
* @param localOrbit local satellite initial orbit
* @param localSatelliteClockOffset local satellite clock offset
* @param remoteSatelliteClockOffset remote satellite clock offeset
* @param remoteOrbit remote satellite initial orbit
* @param remoteAsNumerical flag to choose the propagator builder for the remote satellite, true=numerical false=ephemeris
*/
public void genericTest(final CartesianOrbit localOrbit,
final double localSatelliteClockOffset,
final double remoteSatelliteClockOffset,
final CartesianOrbit remoteOrbit,
final boolean remoteAsNumerical) {
// create the propagator builders
final NumericalPropagatorBuilder localNumericalBuilder = createNumericalPropagator(localOrbit);
final NumericalPropagatorBuilder remoteNumericalBuilder = createNumericalPropagator(remoteOrbit);
// create the propagators
final NumericalPropagator localPropagator = (NumericalPropagator) localNumericalBuilder.buildPropagator();
final NumericalPropagator remotePropagator = (NumericalPropagator) remoteNumericalBuilder.buildPropagator();
// generate the ephemeris
final AbsoluteDate start = localOrbit.getDate();
final AbsoluteDate stop = localOrbit.getDate().shiftedBy(3.0*localOrbit.getKeplerianPeriod());
final EphemerisGenerator remoteGenerator = remotePropagator.getEphemerisGenerator();
final FixedStepStateHandler remoteHandler = new FixedStepStateHandler();
remotePropagator.setStepHandler(60, remoteHandler);
remotePropagator.propagate(start.shiftedBy(-60), stop.shiftedBy(60));
final BoundedPropagator remoteEphemeris = remoteGenerator.getGeneratedEphemeris();
// create the inter-satellite range measurements to the remote SV
final InterSatellitesRangeMeasurementCreator creator = new InterSatellitesRangeMeasurementCreator(remoteEphemeris, localSatelliteClockOffset, remoteSatelliteClockOffset);
localPropagator.setStepHandler(45, creator);
localPropagator.propagate(start, stop);
final List<ObservedMeasurement<?>> interSVRangeMeasurements = creator.getMeasurements();
// we are creating nearly perfect inter-satellite range measurements
// bias should be close to zero and the outlier filter shouldn't reject any measurements
final Bias<InterSatellitesRange> interSVRangeBias = new Bias<>(new String[] { "InterSVRange-bias" },
new double[] { 0 },
new double[] { 1 },
new double[] { -100 },
new double[] { 100 });
final OutlierFilter<InterSatellitesRange> filter = new OutlierFilter<>(0, 5);
final ParameterDriversList measurementParameters = new ParameterDriversList();
final ParameterDriver biasDriver = interSVRangeBias.getParametersDrivers().get(0);
biasDriver.setSelected(true);
measurementParameters.add(biasDriver);
for (final ObservedMeasurement<?> measurement : interSVRangeMeasurements) {
((InterSatellitesRange) measurement).addModifier(interSVRangeBias);
((InterSatellitesRange) measurement).addModifier(filter);
}
final KalmanEstimatorBuilder kalmanBuilder = new KalmanEstimatorBuilder();
// set up the orbital noise
final double[] orbitalP = {1e4, 4e3, 1, 5e-3, 6e-5, 1e-4};
final RealMatrix cartesianOrbitalP = MatrixUtils.createRealDiagonalMatrix(orbitalP);
final double[] orbitalQ = {1.e-4, 1.e-4, 1.e-4, 1.e-10, 1.e-10, 1.e-10};
final RealMatrix cartesianOrbitalQ = MatrixUtils.createRealDiagonalMatrix(orbitalQ);
final double[][] dYdC = new double[6][6];
localOrbit.getJacobianWrtCartesian(localNumericalBuilder.getPositionAngleType(), dYdC);
final RealMatrix jac = MatrixUtils.createRealMatrix(dYdC);
final RealMatrix initialP = jac.multiply(cartesianOrbitalP.multiplyTransposed(jac.transpose()));
final RealMatrix initialQ = jac.multiply(cartesianOrbitalQ.multiplyTransposed(jac.transpose()));
final ConstantProcessNoise noise = new ConstantProcessNoise(initialP, initialQ);
// set up measurement noise
final RealMatrix initialPMeas = MatrixUtils.createRealDiagonalMatrix(new double[] {3});
final RealMatrix initialQMeas = MatrixUtils.createRealDiagonalMatrix(new double[] {1e-3});
final ConstantProcessNoise measNoise = new ConstantProcessNoise(initialPMeas, initialQMeas);
// configure the remote satellite propagator builder
final PropagatorBuilder remoteBuilder;
if (remoteAsNumerical) {
remoteBuilder = remoteNumericalBuilder;
} else {
final SpacecraftStateInterpolator interpolator = new SpacecraftStateInterpolator(4, remoteOrbit.getFrame());
remoteBuilder = new EphemerisPropagatorBuilder(remoteHandler.getStates(), interpolator, new LofOffset(remoteOrbit.getFrame(), LOFType.LVLH_CCSDS));
}
final ParameterDriversList orbitalDriverList = remoteBuilder.getOrbitalParametersDrivers();
final ParameterDriversList orbitalPropDriverList = remoteBuilder.getPropagationParametersDrivers();
for (final DelegatingDriver driver : orbitalDriverList.getDrivers()) {
driver.setSelected(false);
}
for (final DelegatingDriver driver : orbitalPropDriverList.getDrivers()) {
driver.setSelected(false);
}
// add the propagation configurations
kalmanBuilder.addPropagationConfiguration(localNumericalBuilder, noise);
kalmanBuilder.addPropagationConfiguration(remoteBuilder, null);
kalmanBuilder.estimatedMeasurementsParameters(measurementParameters, measNoise);
// build the kalman estimator
final KalmanEstimator estimator = kalmanBuilder.build();
// set the observer
final KalmanObserver observer = new KalmanObserver() {
@Override
public void evaluationPerformed(KalmanEstimation estimation) {
// test the measurements
// System.out.println(estimation.getCorrectedMeasurement().getStatus().toString());
final double[] theoretical = estimation.getCorrectedMeasurement().getEstimatedValue();
final double[] observed = estimation.getCorrectedMeasurement().getObservedValue();
final double residual = theoretical[0] - observed[0];
Assertions.assertEquals(0, residual, 1);
Assertions.assertEquals(Status.PROCESSED, estimation.getCorrectedMeasurement().getStatus());
}
};
estimator.setObserver(observer);
// process the measurements
for (final ObservedMeasurement<?> measurement : interSVRangeMeasurements) {
estimator.estimationStep(measurement);
}
}
/** Create a numerical propagator with gravity and ocean tides.
*
* @param initialOrbit initial satellite orbit
* @return numerical propagator builder
*/
public NumericalPropagatorBuilder createNumericalPropagator(final Orbit initialOrbit) {
final IERSConventions conventions = IERSConventions.IERS_2010;
// Build Propagator
final double minStep = 1.0e-8;
final double maxStep = 600;
final double dP = 0.001;
final ODEIntegratorBuilder builder = new DormandPrince853IntegratorBuilder(minStep, maxStep, dP);
final double positionScale = 10;
final NumericalPropagatorBuilder propagatorBuilder = new NumericalPropagatorBuilder(initialOrbit, builder, PositionAngleType.TRUE, positionScale);
// set mass
final double mass = 1000;
propagatorBuilder.setMass(mass);
// Add gravity
final Frame bodyFrame = FramesFactory.getITRF(conventions, true);
final double equatorialRadius = Constants.EGM96_EARTH_EQUATORIAL_RADIUS;
final double flattening = Constants.IERS2010_EARTH_FLATTENING;
final OneAxisEllipsoid body = new OneAxisEllipsoid(equatorialRadius, flattening, bodyFrame);
final NormalizedSphericalHarmonicsProvider gravityField = GravityFieldFactory.getNormalizedProvider(50, 50);
final ForceModel gravityModel = new HolmesFeatherstoneAttractionModel(body.getBodyFrame(), gravityField);
propagatorBuilder.addForceModel(gravityModel);
// Set Attitude
propagatorBuilder.setAttitudeProvider(new LofOffset(initialOrbit.getFrame(), LOFType.LVLH_CCSDS));
// Add ocean tides
final int oceanDegree = 4;
final int oceanOrder = 4;
final ForceModel tidesModel = new OceanTides(body.getBodyFrame(),
gravityField.getAe(),
gravityField.getMu(),
oceanDegree,
oceanOrder,
conventions,
TimeScalesFactory.getUT1(conventions, true));
propagatorBuilder.addForceModel(tidesModel);
return propagatorBuilder;
}
private static class FixedStepStateHandler implements OrekitFixedStepHandler {
final List<SpacecraftState> states;
public FixedStepStateHandler() {
states = new ArrayList<>();
}
public List<SpacecraftState> getStates() {
return this.states;
}
@Override
public void handleStep(SpacecraftState state) {
states.add(state);
}
@Override
public void finish(final SpacecraftState finalState) {
states.add(finalState);
}
}
}