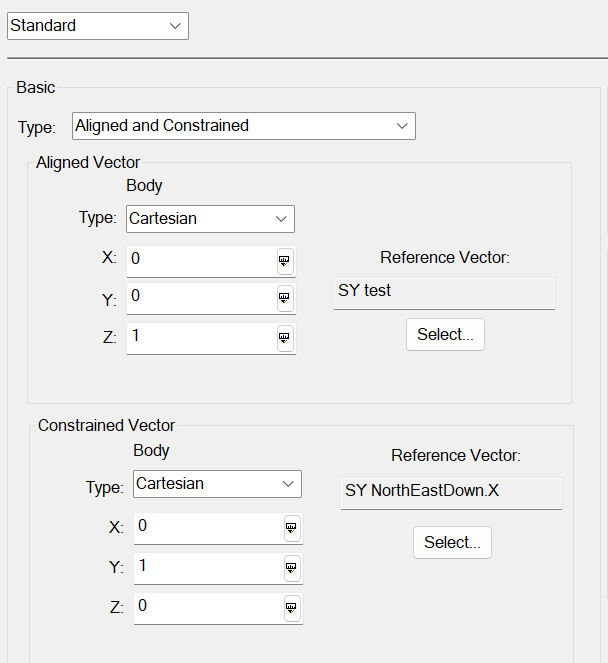
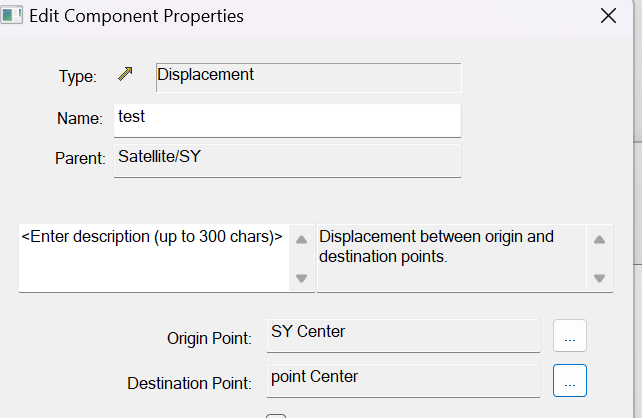
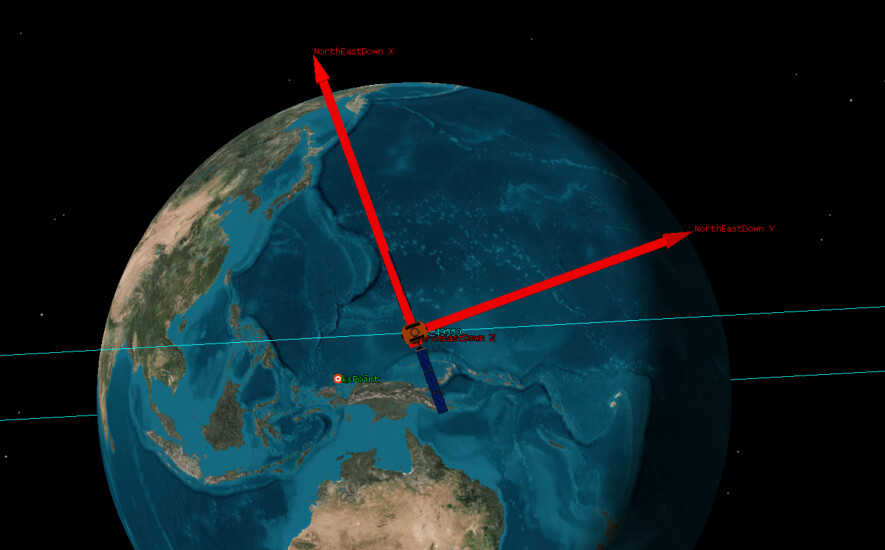
As show in this picture, the aligned vector body is (0,0,1) and the reference vector is a satellite to an earth point, and the constrained vector body is (0,1,0) and the reference vector is NorthEastDown.x. I did not find a way to create an attitudeProvider for it, how to fix this?
Thank you,
SeongYong
I didn’t understand what you were trying to achieve.
What is the tool you’re using? (the one from the screenshots)
Could you describe to us the attitude provider you want to create?
This is an attitude mode I wanted to implement for a while.
It is more general than several modes we have and it is a classical one.
So I opened issue 1478 for this and implemented it. You can give it a try, look at AlignedAndConstrained. This attitude control law is configured using two spacecraft vectors and two TargetProvider instances. The enumerate PredefinedTarget provides several classical target (Sun, Earth, nadir, North, East, velocity, momentum) and GroundPointTarget allows to create a custom target on ground from its coordinates, typically a ground station.
You need to use the development version of Orekit to use this new feature, so I will have to retrieve the develop branch from our git repository.