Hey everyone,
I have been polishing the collision package and I wanted to keep you uptaded on the current implementation of the collision package.
First, you’ll find below a (huge) uml diagram of the current implementation :
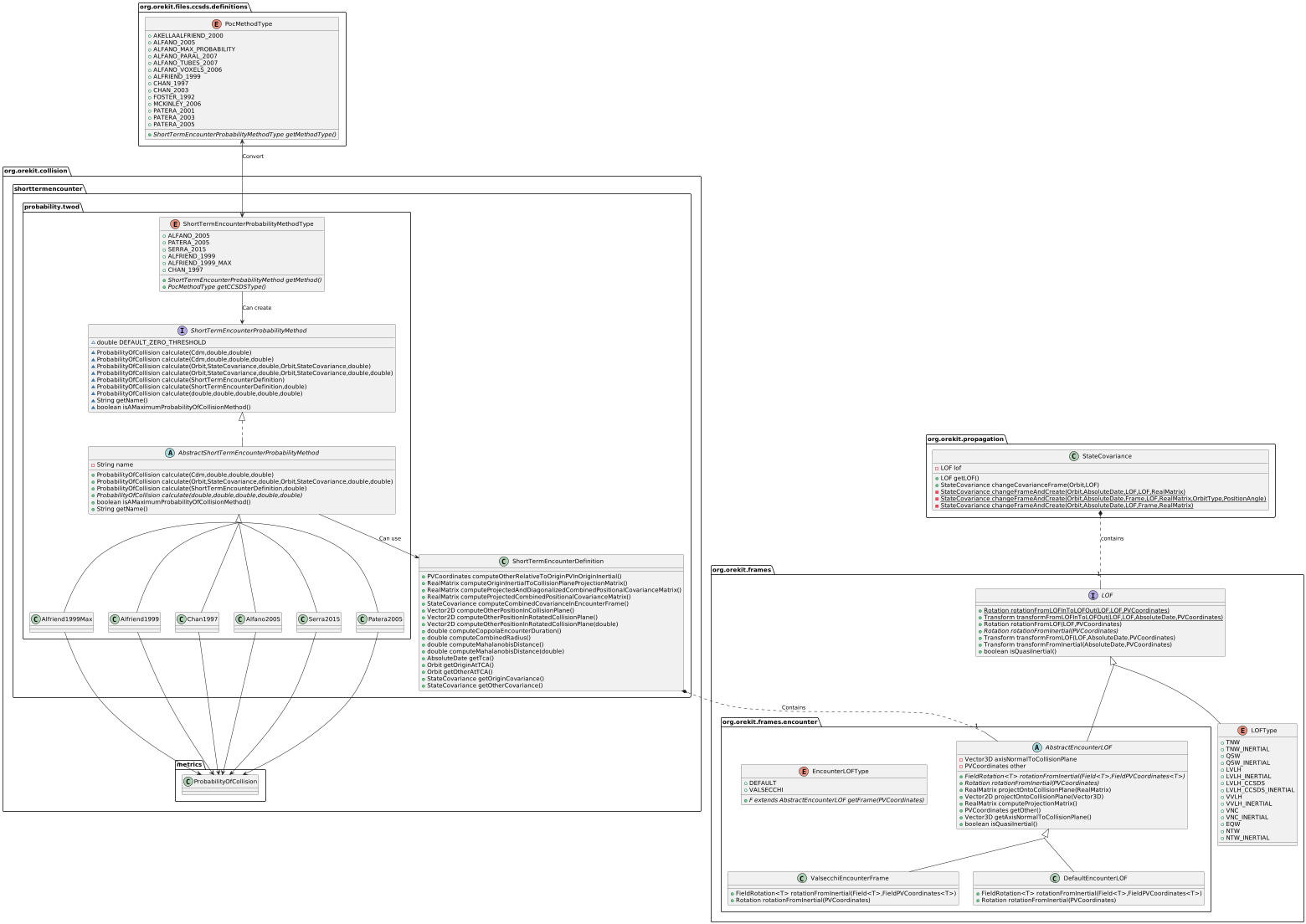
I’ve tried my best to keep it simple while showing all the links and associated functionalities.
I guess that the new significant addition is the implementation of the LOF interface. This was needed to define custom encounter local orbital frames and use them inside StateCovariance.
Also, I deeply modified, ShortTermEncounterDefinition which can now accept user defined encounter local orbital frame. The user can also choose which collision object (primary or secondary) should be at the origin of the encounter local orbital frame.
I’m happy to tell you that everything is tested and I currently have a code coverage of 99%.
I would be happy to have some feedback on this as this is beginning to be quite something ![]()
Wish everyone a good weekend !
Cheers,
Vincent