Hello all,
I’m trying to investigate the propagation of GPS orbit uncertainty over time using a covariance analysis. This is my first time working on this kind of problem, so I’m not entirely sure about both the implementation and the underlying physics.
It seems that my code is working, using the StateCovarianceMatrixProvider and the associated State Transition Matrix.
I’m using the CovariancePropagation tutorial to do so and the well described “Orbit and Covariance Interpolation/Blending with Orekit” Document.
The initial sigmas are :
SIGMA_R = 2.5 m
SIGMA_S = 2.5 m
SIGMA_W = 2.5 m
SIGMA_VR = 0.5 m/s
SIGMA_VS = 0.5 m/s
SIGMA_VW = 0.5 m/s
I’m basically using a NumericalPropagator to do so, with a SSO @ 400 km.
I’m using the following handler to retrieve covariance during the propagation (in the RTN frame)
Covariance handler
@JImplements(OrekitFixedStepHandler)
class Prop_Handler:
def __init__(self, cov_provider, harvester):
self.cov_provider = cov_provider
self.harvester = harvester
self.data = {
"times_s": [],
"states_pv": [],
"cov_qsw": [],
"stm": [],
}
@JOverride
def init(self, s0, t, step):
pass
@JOverride
def handleStep(self, state):
self.data["times_s"].append(state.getDate().durationFrom(EPOCH))
pv = state.getPVCoordinates()
r, v = pv.getPosition(), pv.getVelocity()
self.data["states_pv"].append([
r.getX(), r.getY(), r.getZ(),
v.getX(), v.getY(), v.getZ(),
])
sc_eci = self.cov_provider.getStateCovariance(state)
sc_qsw = sc_eci.changeCovarianceFrame(state.getOrbit(), LOFType.QSW)
self.data["cov_qsw"].append(mat6(sc_qsw.getMatrix()))
stm_j = self.harvester.getStateTransitionMatrix(state)
self.data["stm"].append(mat6(stm_j))
@JOverride
def finish(self, finalState):
pass
And here is the code :
Covariance propagation code
STM_NAME = "stm"
COV_NAME = "covariance"
harvester = propagator.setupMatricesComputation(STM_NAME, None, None)
P0_diag = [SIGMA_R**2, SIGMA_S**2, SIGMA_W**2,SIGMA_VR**2, SIGMA_VS**2, SIGMA_VW**2,]
P0_java = MatrixUtils.createRealDiagonalMatrix(P0_diag)
cov_init = StateCovariance(P0_java, EPOCH, gcrf,OrbitType.CARTESIAN, PositionAngleType.TRUE)
cov_provider = StateCovarianceMatrixProvider(COV_NAME, STM_NAME, harvester, cov_init)
propagator.addAdditionalDataProvider(cov_provider)
times_s_list = []
states_pv_list = []
cov_eci_list = []
cov_qsw_list = []
stm_list = []
T_PROP = N_ORBITS * T_ORB
handler = Prop_Handler(cov_provider, harvester)
propagator.getMultiplexer().add(DT_OUTPUT, handler)
final_state = propagator.propagate(EPOCH.shiftedBy(T_PROP))
times_s = np.array(handler.data["times_s"])
states_pv = np.array(handler.data["states_pv"])
cov_qsw = np.array(handler.data["cov_qsw"])
stm_arr = np.array(handler.data["stm"])
N = len(times_s)
sigma_qsw = np.sqrt(np.array([np.diag(cov_qsw[k])[:3] for k in range(N)]))
sc_final = cov_provider.getStateCovariance(final_state)
P_qsw_final = mat6(sc_final.changeCovarianceFrame(final_state.getOrbit(), LOFType.QSW).getMatrix())
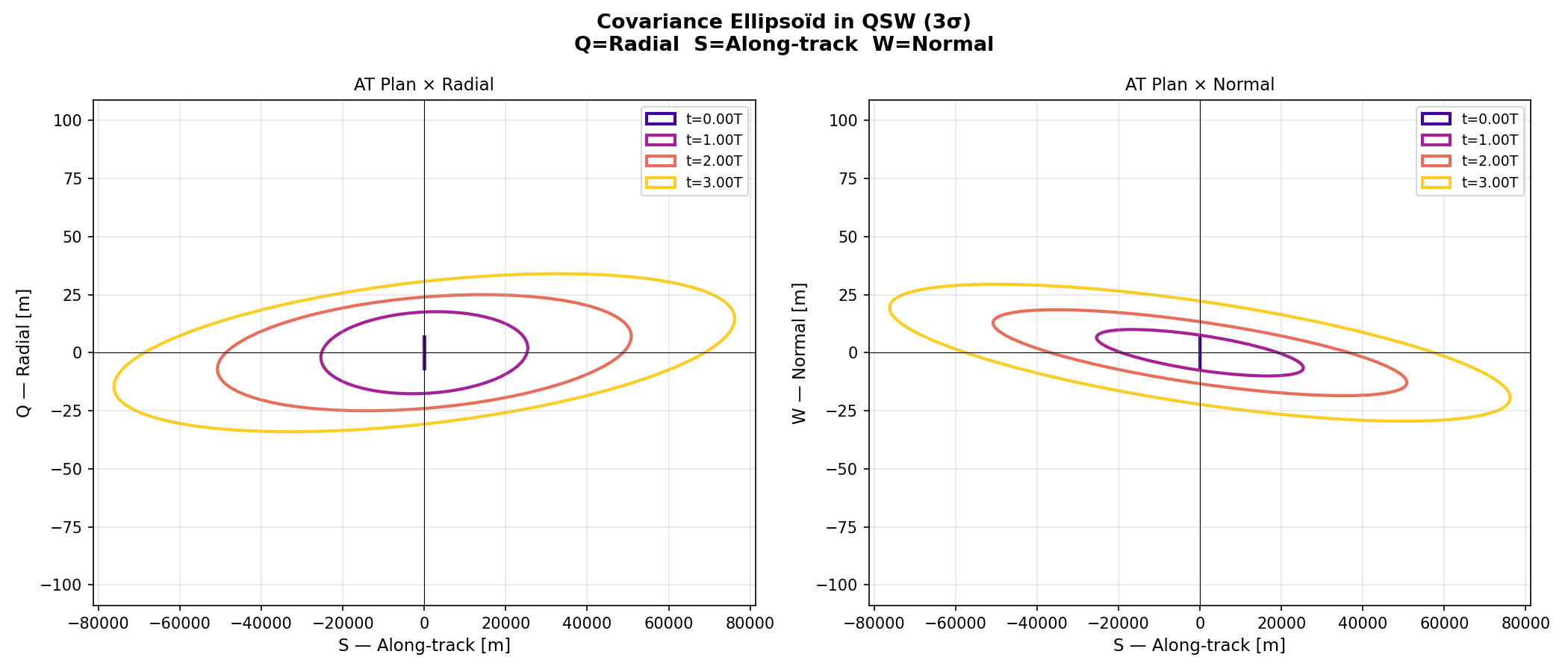
Here are the outputs :
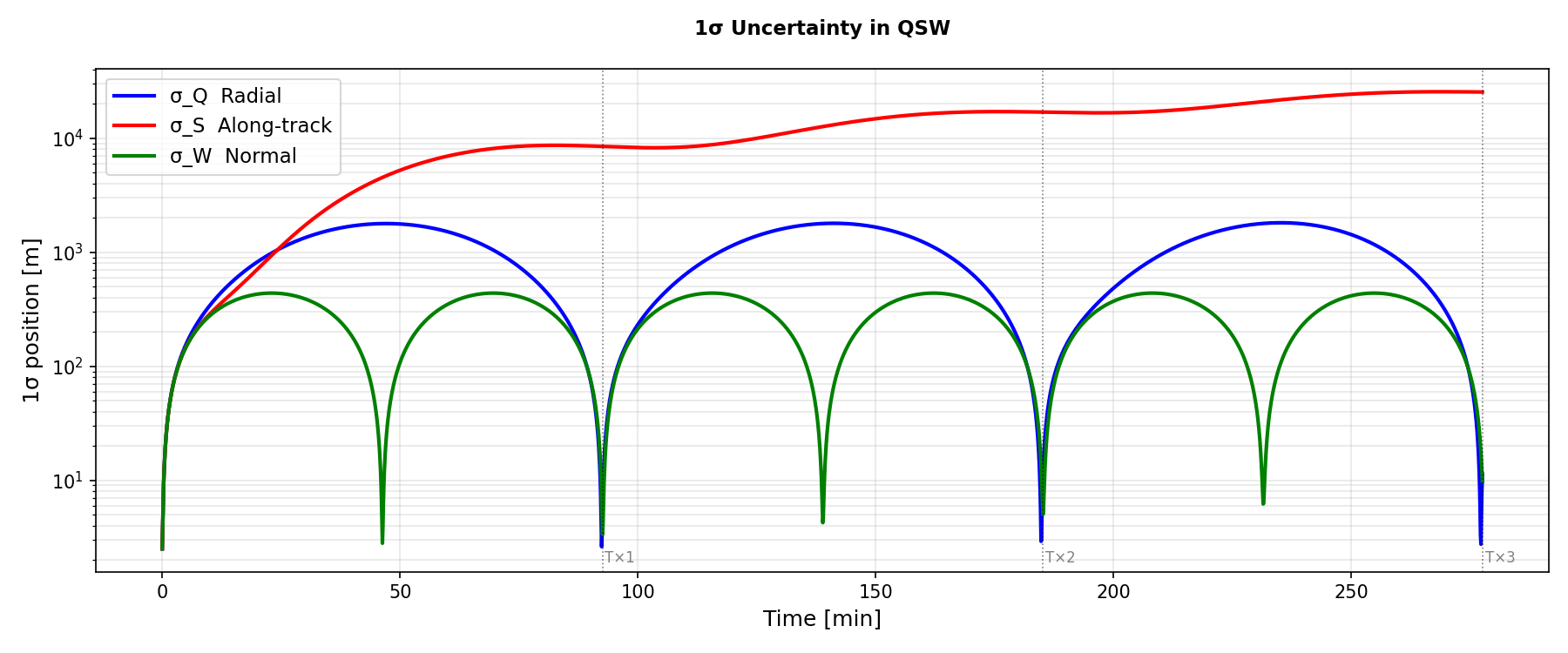
Questions :
- Is it normal to observe a divergence in the along-track sigma? If not, could there be an issue with the code?
- How can the apparent periodic behavior of the normal and radial sigmas be explained? (When zooming in, it seems they are actually growing rather than purely periodic.)
- Can I do the same by changing the initial sigmas to (200 m, 1000 m, 200 m) to investigate a more general TLE uncertainty?
Sorry if my questions are basic, and thank you for any help you can provide!
Cheers,