Dear all,
I am using Orekit to perform a coverage analysis. My inputs are the ranges of angle of incidence that the spacecraft payload can see on the ground: at this preliminary stage, I have used the assumption of spherical Earth to transform this angle of incidence range into a range of look angles (from spacecraft point-of.view) and I have used DoubleDihedralFieldOfView to simulate the payload properties.
Right now I can gather information whether a target is within my field of view during the propagation, but I would also like to check that the value angle of incidence at which I am seeing the target is within the ranges specified (it should be, given that my FoV has been correctly initialized from the spacecraft side).
Is there a way to exactly retrieve the angle of incidence of a target on ground with respect to a spacecraft?
Sorry for the reply, but could I use:
90°- elevation ?
Having the angle of elevation defined in the topocentric frame on ground, the incidence angle isn’t its complementary? The first is defined as the angle between the tangent plane and the spacecraft, the second as the angle between the spacecraft and the normal with respect to ground. In this way, I could use the getElevation() method to obtain the incidence angle too.
First of all, sorry for the delay. Questions sometimes slip through .
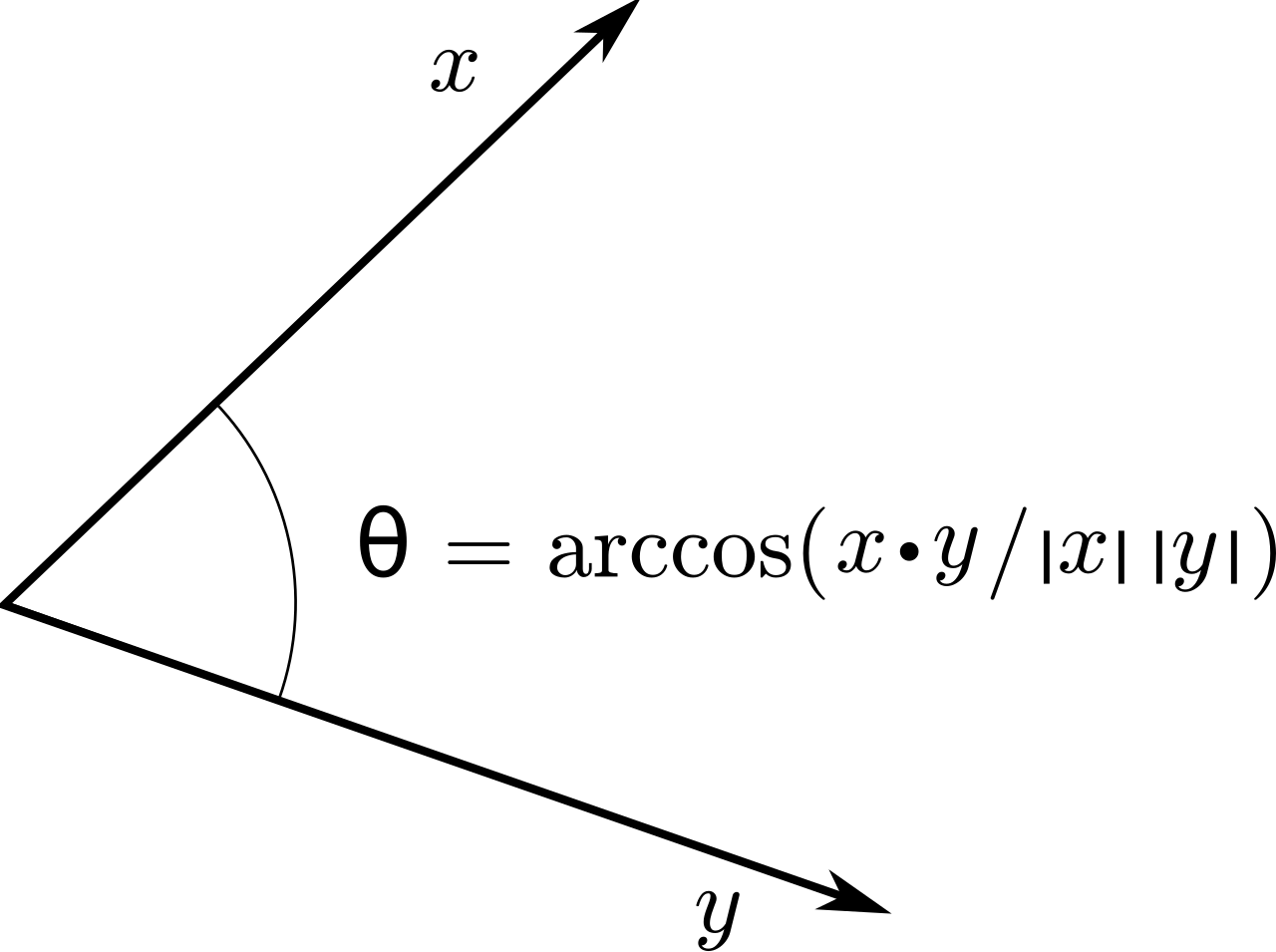
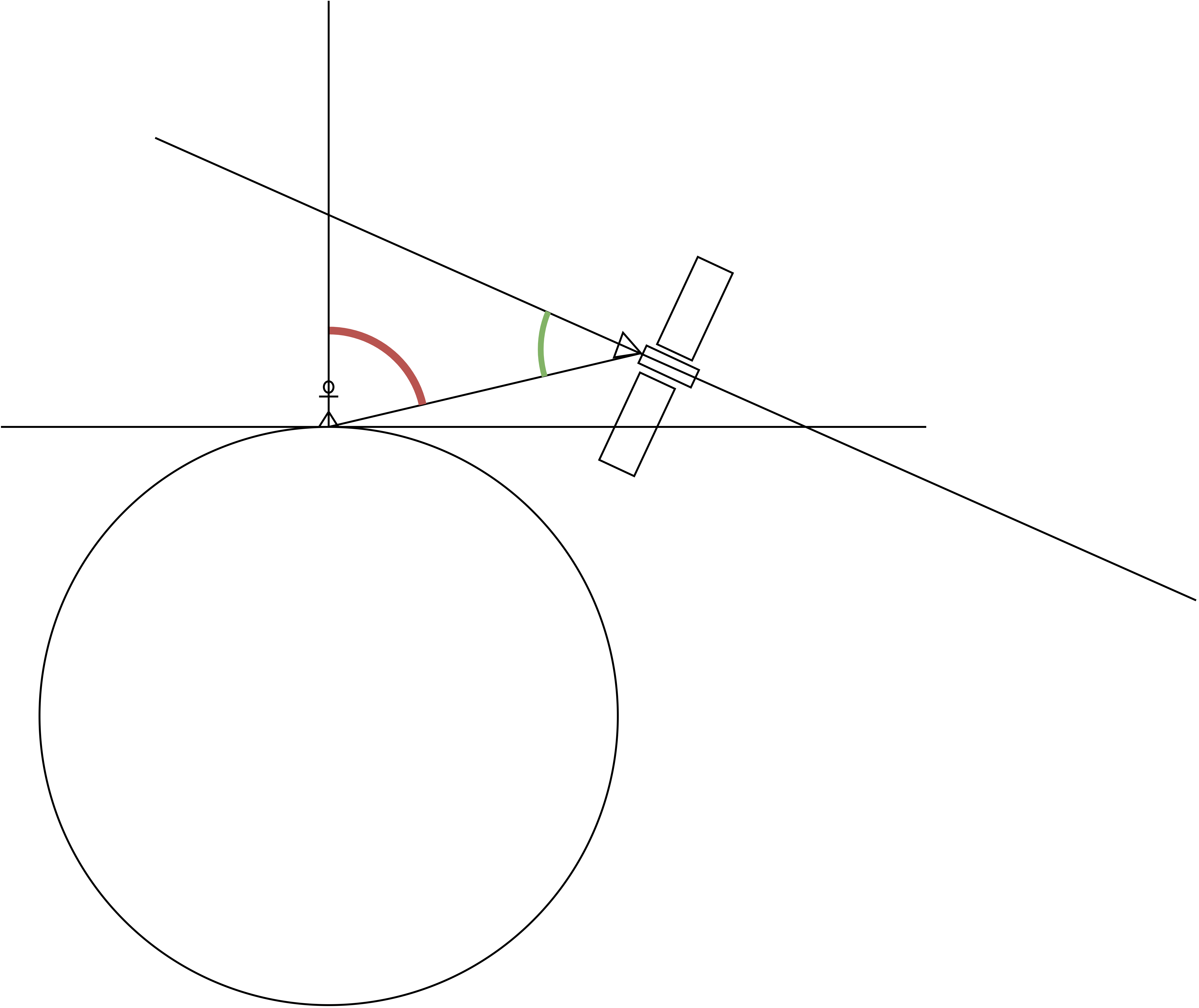
If my understanding of your problem is right, you can use the dot product formula to retrieve the elevation of your target with respect to your sensor fov direction.
On the image above, if x is your sensor’s pointing direction and y the vector from your spacecraft to your target, then the given formula will give you the elevation angle.
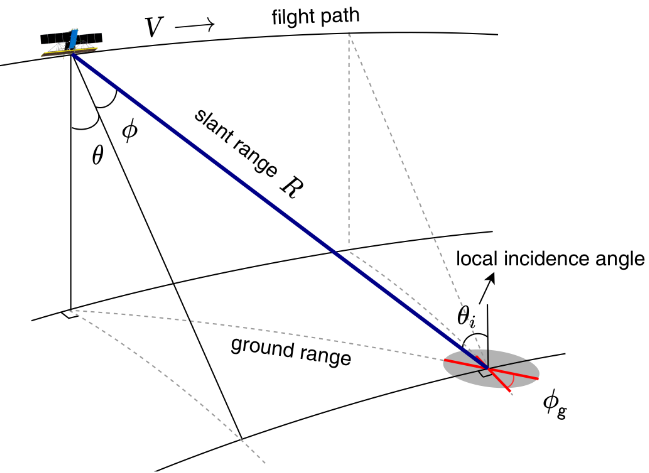
Probably I did not define correctly the incidence angle in my post, but for me the local incidence angle of the target on ground is defined as shown below:
Therefore, it seems like the elevation (defined as the angle between the tangent plane and the position of the spacecraft) is the complementary of the incidence angle, which should be exactly the red angle drawn in your diagram.
Ok so if i’m getting this right, your angle of incidence is independant of your sensor’s pointing direction (i.e. computed using the sat-to-target vector only) ?