Hi all,
I did some investigations about this subject and about my suspicion about the inertial accelerations being wrong when integrating in a non-inertial or pseudo inertial reference frame (such as J2000).
To do so, I numerically integrated the equation of motion of an initial state retrieved from a reference ephemeride using Dopri853 scipy integrator and did the same propagated with orekit (same propagator as in previous posts). In my force models, I added the inertial acceleration of the frame origin (inertial forces are also added on Orekit side, the force model is the same in both propagators). And below is what I obtain in terms of position error (‘custom’ is my own propagation using Dopri853 integrator):
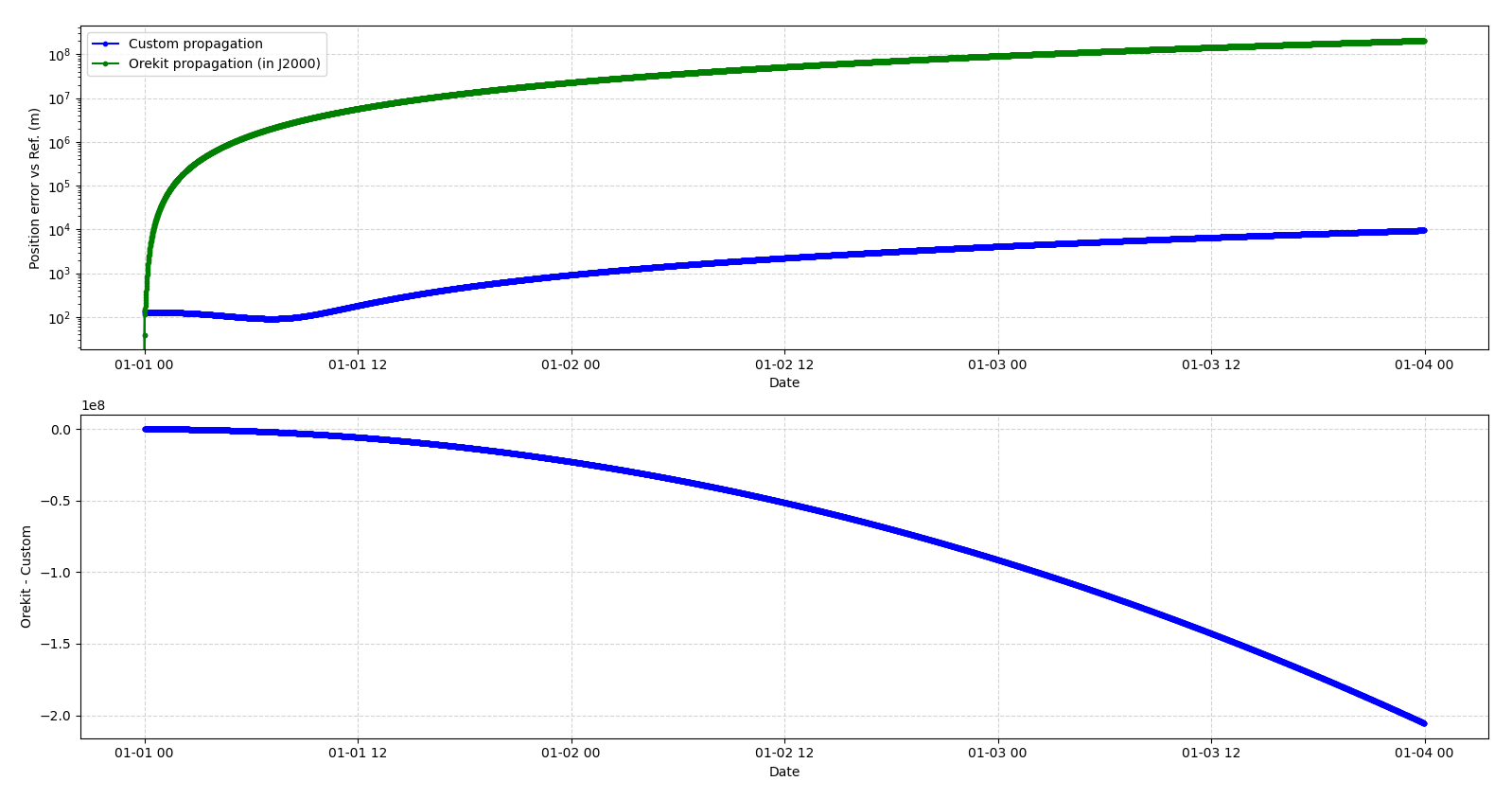
We can clearly see the custom propagation is quite correct ( 1km error at end of the 4 days propagation) while orekit is very far from it.
If I set to zero the inertial acceleration in my custom propagator, I obtain this:
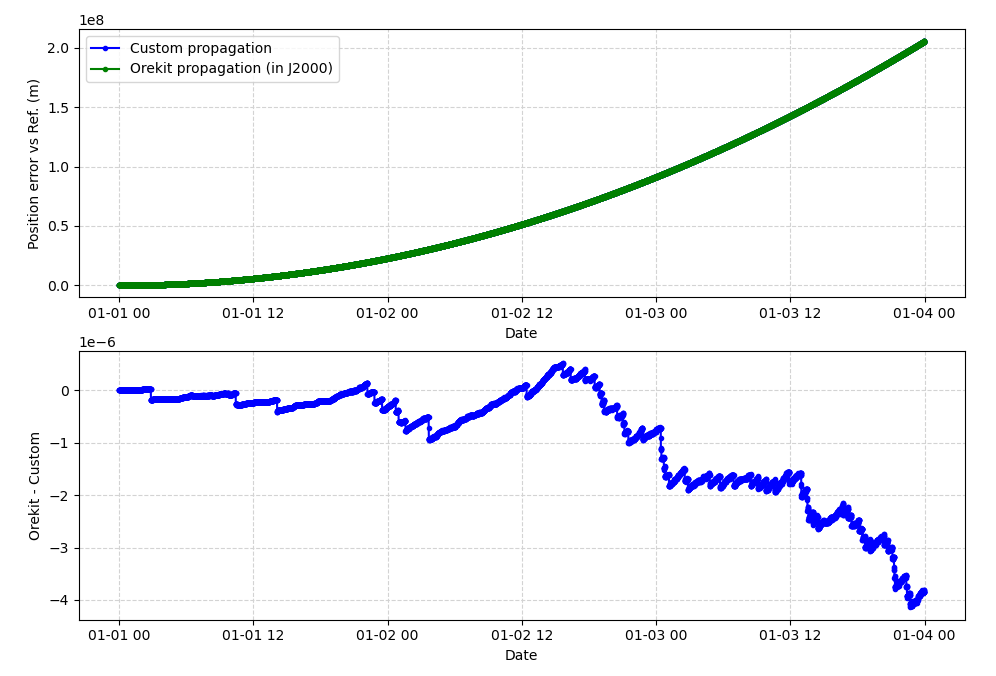
The two propagators agree perfectly. So I think this demonstrates that the inertial acceleration is not taken into account when propagating in an pseudo inertial reference frame such as J2000.
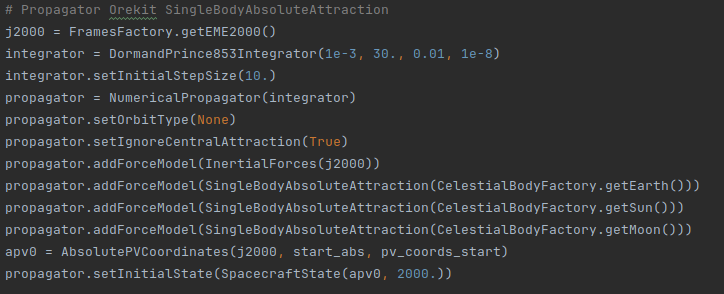
Or perhaps I have made a mistake in the configuration of the inertial forces ? Below is the configuration of my Orekit propagator:
Many thanks in advance,
François